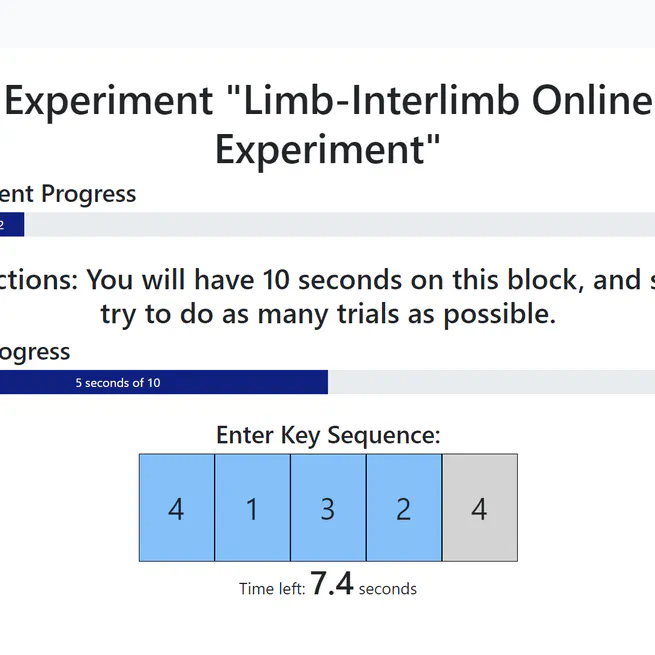
Open-source web application for motor learning research
The motivation for this project was to address significant barriers in procedural skill learning research. Traditional motor learning experiments require controlled lab environments, which limit sample size, accessibility, and diversity. Inspired by the need for more inclusive and scalable research methods, I developed an open-source online platform. This platform democratizes access to motor learning studies by removing coding prerequisites and simplifying experimental setup, making cutting-edge research feasible for a broader audience.
Mar 1, 2023
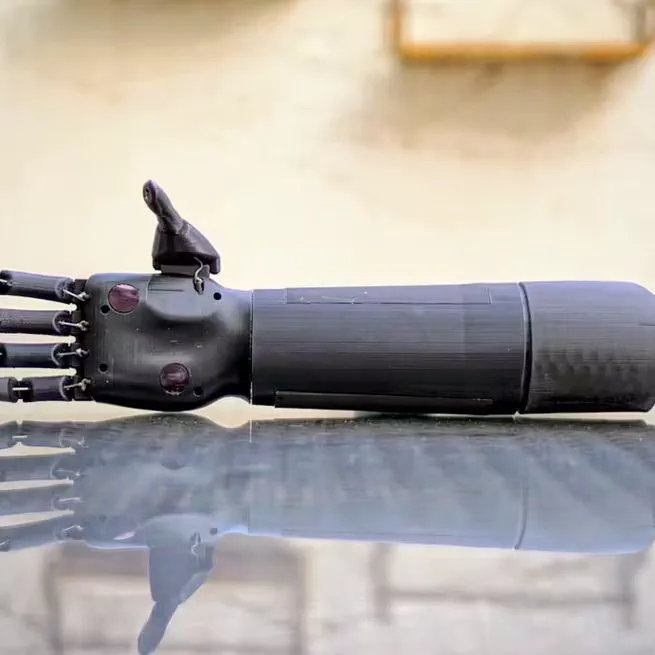
High-Five: open-source myoelectric upper-limb prosthesis
I developed High-Five, the first Chilean upper-limb myoelectric prosthesis (shown in the image above), which uses surface EMG electrodes to control a five-degree-of-freedom (DoF) robotic hand. This project aimed to provide a functional, accessible, and open-source solution for individuals requiring upper-limb prosthetics.
Dec 31, 2020